背景
机器人正在从工业生产,自动运输,公共安全和个人助理到医疗应用的许多不同领域进入我们的日常生活。因此,它们在物理上越来越接近我们的人体。例如,目前正在考虑使用机器人执行由MRI成像指导的手术。对于这样的未来应用,机器人与人体之间的安全交互成为必要。自从迈克尔·法拉第(Michael Faraday)在1821年展示第一台基本电动机以来,构成常规机器人核心部分的电磁电动机的设计就发生了许多变化。尽管如此,绝大多数常规电动机仅由硬质材料(如铜或铁)制成。许多刚性部件之间的相互作用对于完成复杂的任务是必不可少的,但是当在人体或易碎物体附近操作此类设备时,这些设备就变得较为危险。传统机器人技术的主要技术局限性推动了新型软功能驱动器的开发,这些驱动器对各种激励敏感,包括热,湿度,pH,光,压力,电场或磁场。
然而,当前的软功能驱动器在诸如延迟响应时间或低功率之类的实际应用中遇到限制,难以精确控制或需要危险的刺激(例如高压)。例如,尽管介电弹性体驱动器显示出良好的机械性能,但其致动电压通常超过数千伏,并给人体带来电击风险。气动驱动器由于能够产生很大的力而被广泛用于软机器人甚至康复设备中,但需要高压设备(> 300 kPa)并且响应速度很慢(<0.5 Hz)。由弹性体和铁磁填充物组成的不受束缚的软磁机器人易于小型化并通过无线方式供电,使其成为生物医学应用的理想选择。然而,它们在制造完成之后,其运动模式也固定了,难以实现精确的局部控制,自由度非常有限。与当前的软功能驱动器相比,传统的电磁电机仍具有许多优势,例如响应速度快,驱动电压较低以及高度可编程和控制良好的运动。 通过改进结构和材料,使得我们可以设计新型软电磁驱动器(SEMA)。到目前为止文献中的该类驱动器的基本设计大体与常规扬声器类似,只是用液态金属线圈代替了铜线。在这样的设计中,液态金属线圈被主要由径向磁场分量产生的洛伦兹力拉动和推动。由于在磁体中心几乎为零且在边界处较大,因此液态金属线圈的尺寸应大于磁体的尺寸。这限制了驱动器在小型磁体的弱磁场中的小型化,性能和多功能性。此外,由于磁场强度随着距磁体表面的距离减小而快速衰减,因此必须减小驱动器与磁体之间的距离。现有的SEMA包含了由固定磁铁的坚固框架组成,并没有将磁铁与驱动器进行分离。因而,目前的SEMA难以做到小型化,其多自由度设计也非常困难。
我们介绍了软电磁驱动器(SEMA),它是用嵌入弹性体外壳中的液态金属通道代替固态金属线圈。我们展示了人类友好,简单,可拉伸,快速,耐用且可编程的厘米级SEMA,它们可以驱动软体鲨鱼,与日常物体互动或将染料与水快速混合。具有独立控制花瓣的多层螺旋花SEMA在数十毫秒内开花或闭合,而立方SEMA执行已编程的任意运动序列。我们开发了一个数字模型,该模型支持设计并为实现小型化,降低功耗和提高机械效率开辟了潜在的途径。 SEMA是电控制的形状变形系统,有可能使从软抓具到微创医学的未来应用成为可能。
- SEMA设计策略与制备
我们的设计可以使得驱动器不在需要特殊的磁场,例如喇叭所需的发射型磁场。因而可以使得驱动器与磁铁进行有效分离。从而我们的机器人在医疗外科手术中可以大展身手,在核磁共振机器在提供驱动器所需强大磁场的同时,相应的成像功能可以为机器人提供导航。这种方法可能在医疗应用领域(如微创医学),利用SEMA替代传统的电磁电机和机器人。在这里,我们提出了几种设计策略和一套方法来制造高性能和全软电磁驱动器,以为软形式的机器人提供动力。现在,我们探索SEMA的六种主要设计策略:
- 使用了一块大的块状磁体,该磁体提供了在空间上扩展的强磁场,使我们能够将SEMA与刚性磁体完全分开,从而使它们完全柔软。
- 对平板磁铁的磁场分布进行了表征和建模。这允许通过使用为此目的开发的数值模型来预测驱动器的机械响应,并进而提供设计准则来增强我们的SEMA的性能。
- 与圆形线圈相比,矩形线圈的使用会产生更大的磁转矩。
- 我们的SEMA设计定义了垂直于平板磁体表面的线圈平面,从而增加了平面外洛伦兹力。
- 一种经济高效的成型方法用于制造SEMA。这种易于定制的制造方法提供了能够提供更高驱动电流的较厚的液态金属通道。
- 我们的SEMA中使用了多个线圈,以增加力输出和自由度。
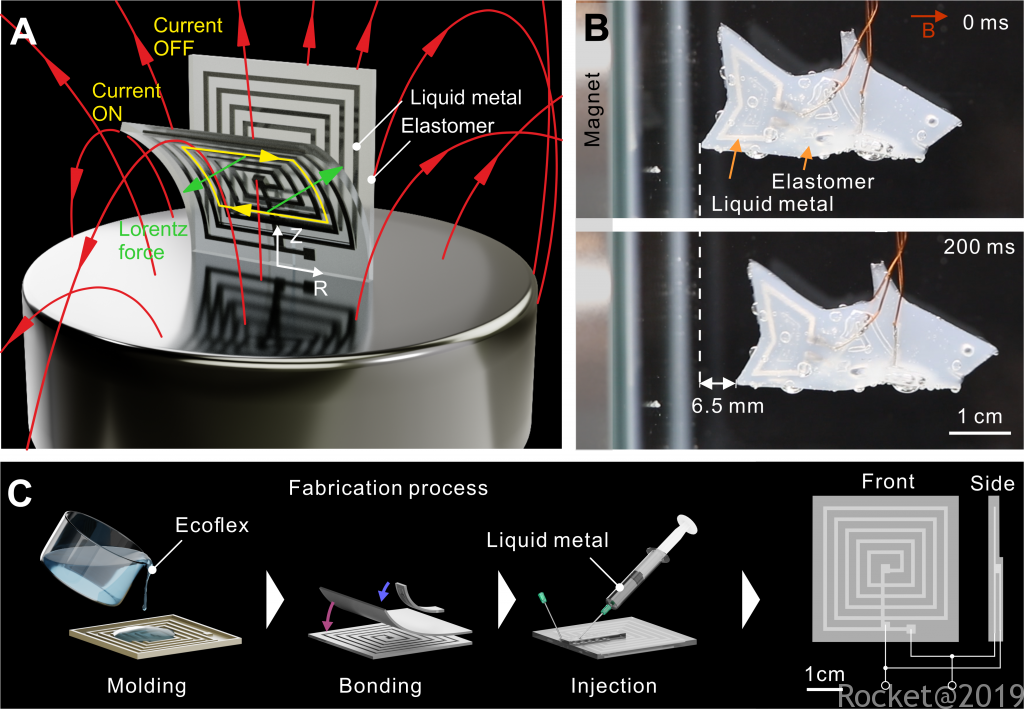
常规的直流电动机主要由定子,转子,换向器和一对电刷组成。我们的新型SEMA通过将硬质零件和结构替换为嵌入在柔软弹性体外壳中的液态金属通道,从而使这些设计更为合理。另外,类似于定子,板状永磁体用作磁场源。与传统的直流电动机不同,我们的SEMA更柔软,零件更少,因此由于较少的零件容易发生机械故障,因此在小型化和坚固性方面可能具有优势。工作原理在图1(A)所示。当电流因洛伦兹力流过导电通道时,设置在装置中的单线圈方形SEMA(图S1B)将弯曲。这种SEMA可以直接用作软机器人的电动机,而不必像常规DC电动机那样通过连杆和齿轮传递力。驱动电压低于1 V,因此对人体无害,甚至允许在水下操作。我们用游泳的软体鲨鱼(图1(B))演示了这一点,其中SEMA充当尾巴和鳍。本文中的SEMA的外壳采用模型法制备,后期注入液态金属并通过导线与外界相连。
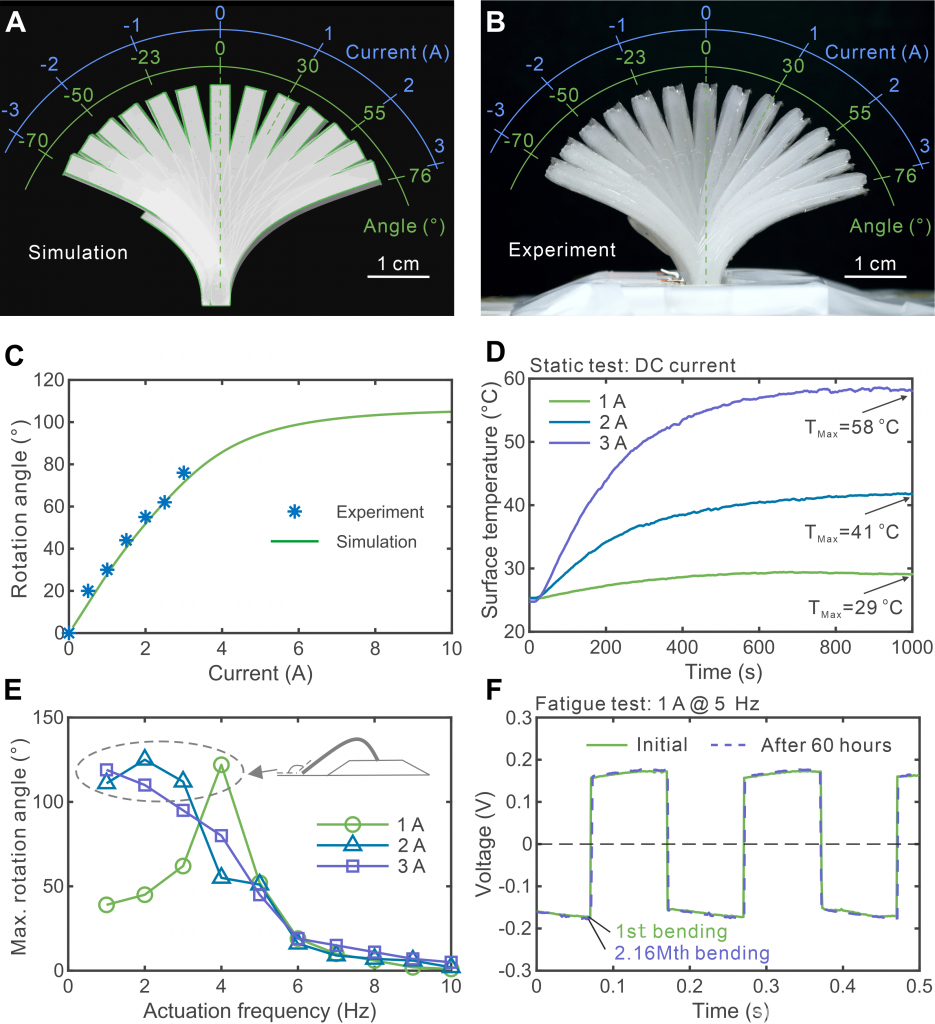
我们采用了实验和模拟两种方式测试了SEMA的性能。图2(A)与(B)首先展示了我们模拟的方法的准确性,同时也展示了结构的基本运动形势,即弯曲。在3A的电流下,结构本身可以发生76度左右的弯曲。通过数值模拟,可以预测出更大电流下的结构弯曲角度(图2(C))。考虑到驱动器运行过程中的焦耳热效应,我们对于SEMA进行了静态热稳定测试(图2(D))。其在长时间1A驱动电流下的温度能稳定在29摄氏度,而在3A电流下温度能稳定在58度。在实际运行过沉重,考虑到结构本身与周围环境的更高效的热交换,在3A交变电流驱动下,结构的稳定温度降到46度。
在动态测试过程中,结构本身具有一定的共振频率(图2(E)),从而即使在1A电流驱动下,结构本身的最大转动角度也可以达到120度以上。我们还对驱动的疲劳性能进行测试,在1A,5Hz的电流驱动下,经过2百万次的弯曲测试之后,结构的性能没有发生衰减。
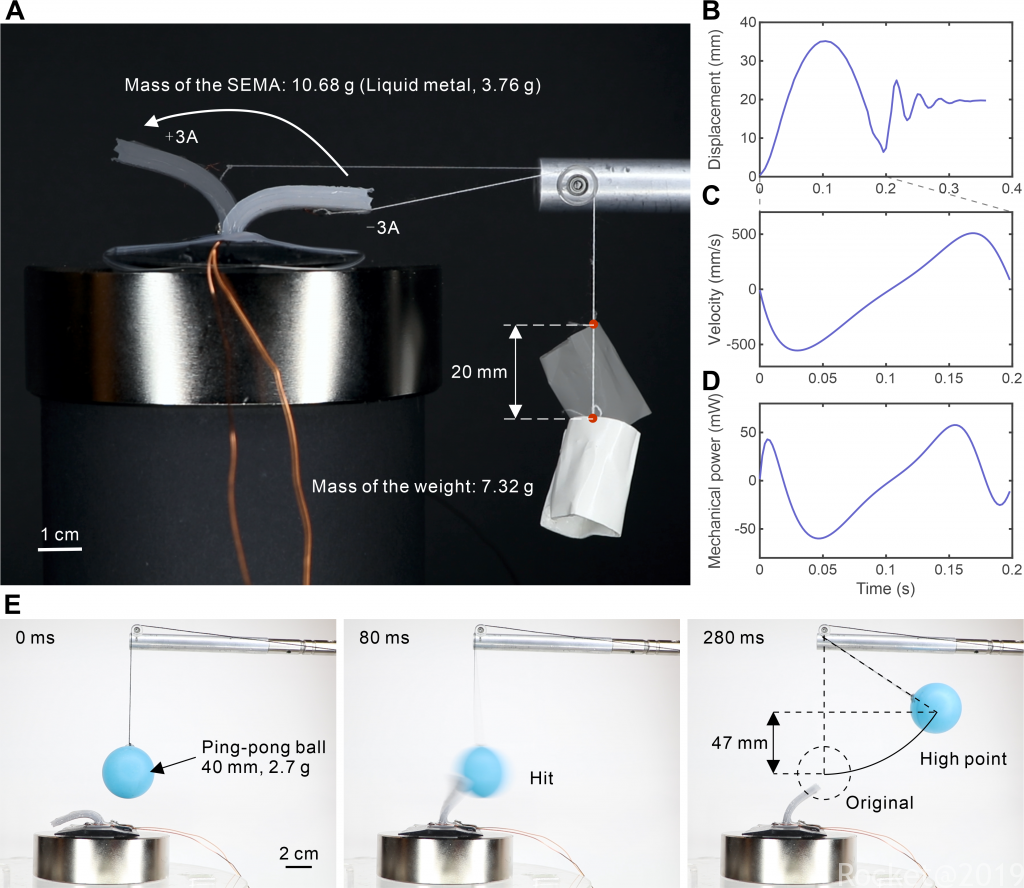
我们还设计了一个测量驱动器功率以及效能的装置如图3(A)所示,通过测量重物的位移,我们可以知道重物的速度以及加速度进而获得驱动器的功率以及效率等信息(图3(B-D))。经过计算,在3A的驱动电流下我们设计的驱动器具有57mW的最大输出能力以及5.3 mW/g的能量输出密度。然而其效率较低,低于1%,绝大部分能量都通过焦耳热效应耗散于环境之中。通过数值模拟,我们展示了通过合理的结构设计,例如减少结构的厚度,其效率可以提高至20%。进一步地在实验中的磁场强度大致在300 mT,而如果提高磁场强度到4T,驱动器的机械效率可以高达90%以上。通过图3(E)我们还进一步展示了驱动器可以用于拍击乒乓球,而如果采用传统电机驱动,所需要的结构显然比较复杂。
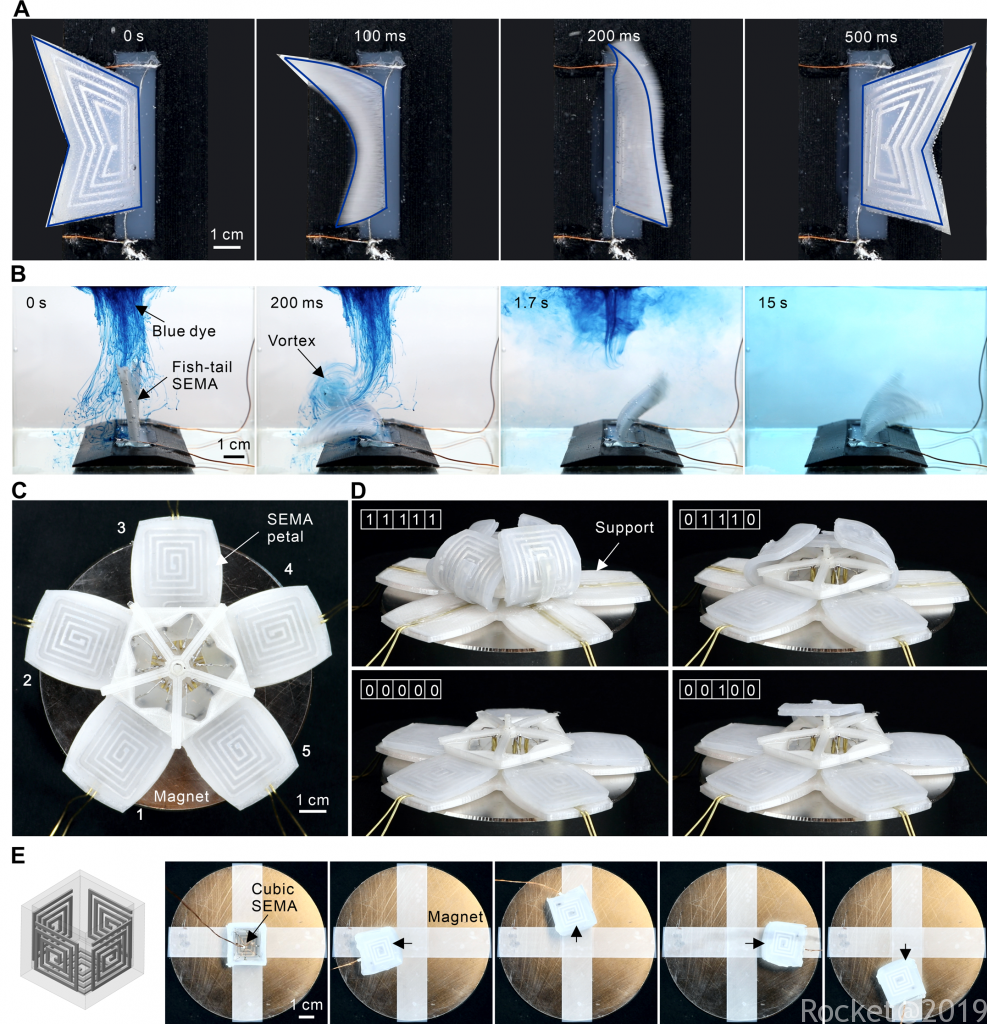
SEMA的驱动形式与传统电机不同,其力可以直接作用于物体而不需要通过齿轮、连杆等结构传递。我们设计了如图3 所示的鱼尾结构(图4(A)),并使用其用于混合染料,相对于传统的磁力搅拌器,SEMA的搅拌器的效率更高(图4(B))。进一步地,我们设计了花形SEMA(图4(C)),其由5个可独立控制的SEMA构成。通过编程,其可以实现复杂的构型(图4(D))。实验结果表明,花形SEMA可以实现80 ms 完全闭合或者开启。最后设计了多面体SEMA(图4(E))从而实现了在不同环境中都可以驱动,不存在自锁行为即结构只有面内变形而没有面外弯曲变形。
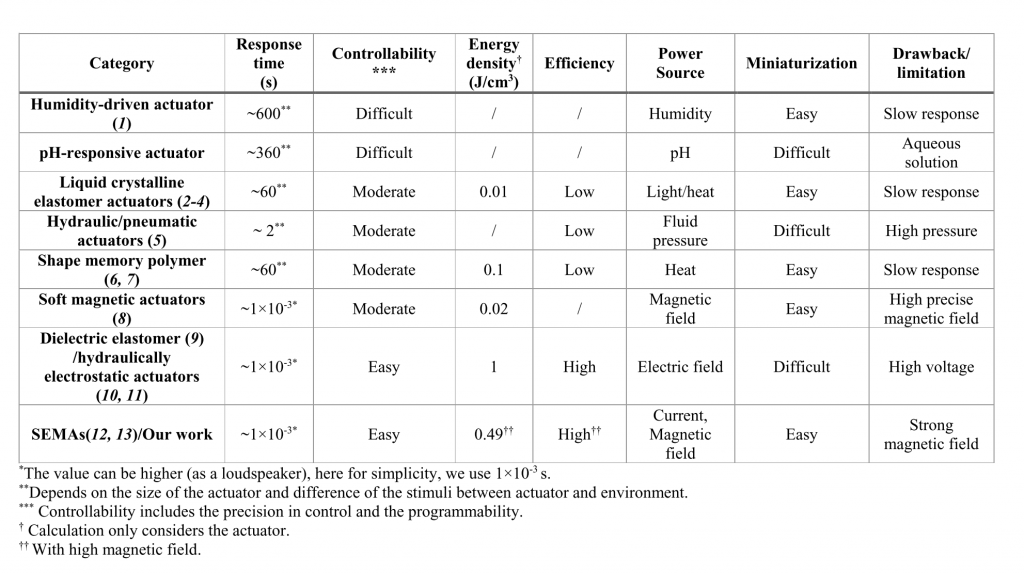
在此研究中,基于常规电磁驱动器的原理,我们在此介绍一系列快速响应且高度可控的SEMA(与当前流行的软驱动器进行比较,请参见表1)。它们的整体柔软性和较低的驱动电压(<1 V)使它们在与生物体和易碎物体接触时非常安全。实验和理论分析预测,如果受到强磁场的影响(可从商用核磁共振机器获得),SEMA具有高能量密度,功率密度和效率。仿真表明,在400 mT中将尺寸从厘米减小到微米时,单线圈SEMA弯曲30°所需的驱动电流和功耗分别从0.56 A降至1 mA,从57 mW降至0.13 mW。磁场。该模拟还表明,使用永磁体可以实现20%的机械效率,而在4 T磁场下甚至可以接近100%。与传统电机不同,我们的SEMA由于其结构简单,简单的制造过程以及低成本电力电子设备的广泛可用性而易于小型化。此外,我们的SEMA受到良好的控制且易于编程,从而可以在花朵SEMA等更复杂的结构内单独驱动软机器人元件。我们的数值和实验分析提供了充足的途径来改善SEMA的功率输出和机械效率。新型的,低电阻率的液态金属材料,例如Cu-EGaIn混合物似乎很有希望。同样,液态金属线圈匝数的增加会增加力和功率输出。较薄的驱动器尽管最终难以实现并需要新的外壳材料,但也会提高性能。小型和多线圈SEMA的制造有望在医疗应用中使用SEMA。
将来,我们的工作可能会转化为大量实例,并彻底改变用于医疗应用的高级微型机器人的发展,如药物输送,组织诊断和细胞处理。这样一来,“神奇之旅”的经典电影场景可能会在一天之内变成现实。在这种场景中,微型潜水艇摧毁了血块并挽救了病人的生命。
Authors: Guoyong Mao*, Michael Drack†, Mahya Karami-Mosammam†, Daniela Wirthl, Thomas Stockinger, Reinhard Schwödiauer and Martin Kaltenbrunner*
Title: Soft electromagnetic actuators
Published in: Science Advances, doi: 10.1126/sciadv.abc0251.
相关视频:
全文链接:https://advances.sciencemag.org/content/6/26/eabc0251