软体机器人与柔性电子器件在传感、驱动、通讯等领域应用前景广阔,但传统制造方案存在流程复杂、大量依赖人工操作等痛点,现有3D打印方案也难以兼顾导线高导电性、多层复合结构与一体化成型制造。
近日,研究团队开发出基于直写式(DIW)打印的多材料3D打印新策略,实现内嵌多层高导电液金属线圈的弹性体器件3D打印一体成型。团队基于该技术制造得到具有高力学性能以及驱动感知一体化软体电磁驱动器,并完成多款器件展示验证,相关成果在 Research 期刊以 Integrated 3D Printing of Liquid Metal and Elastomer for Soft Robots and Electronics 为题发表。
更多视频内容:浙江大学| movie s1 液态金属与弹性体的集成3D打印用于软体机器人和电子设备_哔哩哔哩_bilibili,欢迎关注课题组哔哩哔哩账号:Maolab-ZJU,微信公众号:MaoLab。
核心技术亮点:攻克高导电率多层线圈一体化成型瓶颈
团队创新性提出弹性体-液态金属交替打印+垂直锥台层间互联的一体化打印工艺,采用三种墨水,全程无需模具、灌注、手动键合等后处理,实现多层线圈软体电磁器件的3D打印成型。
定制化墨水体系:自研弹性体基底(EPPC)、Ecoflex支撑包裹层(ECO)、镍改性液态金属导电墨水(NLM),通过精准调控流流变性能使其符合DIW打印工艺;
核心工艺创新:通过垂直打印NLM锥台实现相邻线圈层的电学互联,解决了多层复杂结构制造的行业痛点;
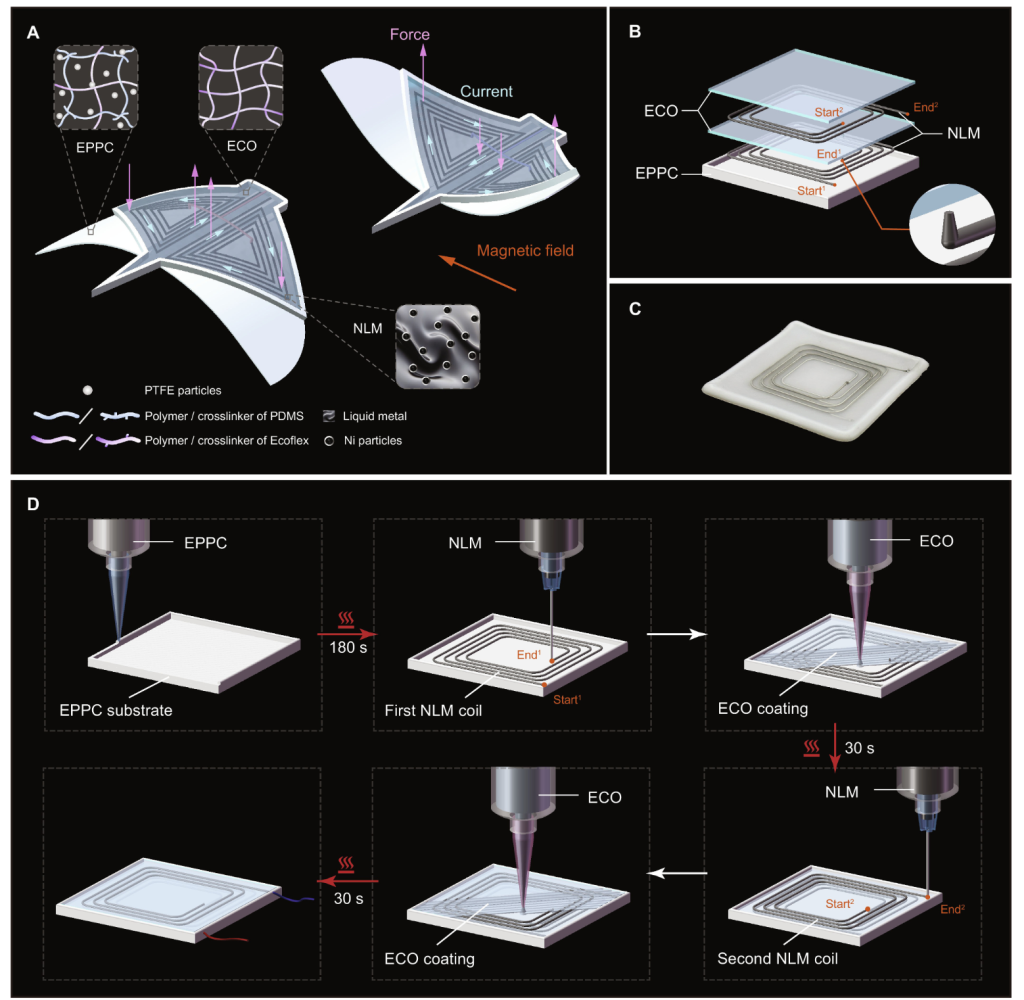
图 1. 软体电磁机器人的设计原理及多材料 3D 打印工艺示意图。(A) 以蝠鲼状软体电磁机器人为例,展示其制备材料与拉普拉斯力驱动原理;(B) 带双层线圈的方形软体电磁致动器的爆炸视图,该驱动器由一层 EPPC 基底、两层 NLM 线圈和两层 ECO 层组成;(C) 3D 打印制备的双层线圈软体电磁驱动器实物图;(D) 制备多层软体电磁驱动器的一体化多材料 3D 打印工艺流程分步示意图,红色箭头代表打印层的固化过程。
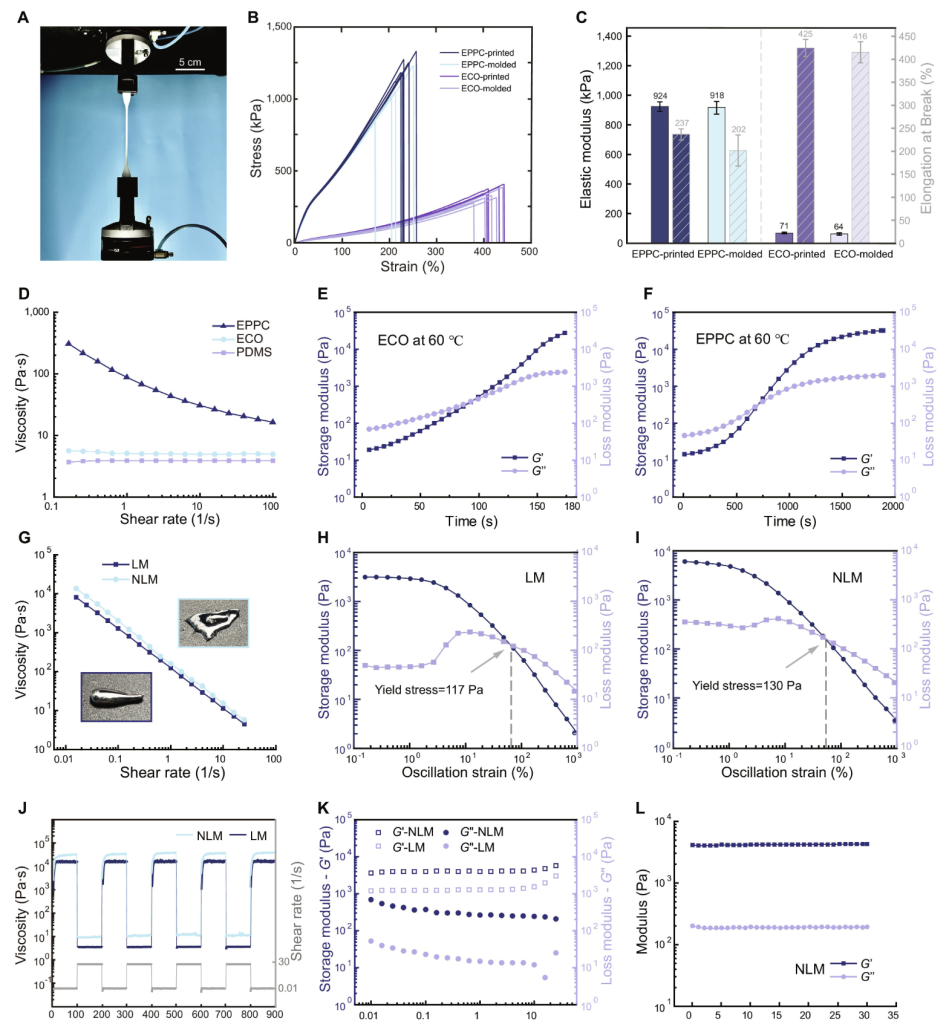
图 2. 弹性体和液金属墨水的力学与流变学表征。(A) 固化弹性体样品的拉伸测试装置;(B) 3D 打印和模铸制备的 EPPC 与 ECO 弹性体的应力 – 应变曲线;(C) 3D 打印和模铸制备的 EPPC 与 ECO 弹性体的弹性模量及断裂伸长率;(D) 各类弹性体墨水的粘度 – 剪切速率曲线;(E、F) 60℃条件下,ECO 和 EPPC 墨水固化过程中储能模量(G′)和损耗模量(G″)随时间的演化规律;(G) 纯液金属(LM)与镍颗粒改性液金属(NLM)墨水的粘度对比图及实物照片;(H、I) 纯液金属与镍颗粒改性液金属墨水的振荡振幅扫描曲线;(J) 用于表征纯液金属与镍颗粒改性液金属墨水粘度恢复行为的三区间触变性测试曲线;(K) 纯液金属与镍颗粒改性液金属墨水的频率扫描曲线,展示储能模量(G′)和损耗模量(G″)的变化;(L) 镍颗粒改性液金属墨水的储能模量(G′)和损耗模量(G″)随时间的稳定性测试结果。
优秀的性能表现:具有出色的导电性能与体积力密度
团队完成材料-工艺全链条优化,实现器件机电性能跨越式提升:
导电性能优异:NLM导线0应变下电导率达1.15×106 S/m,200%拉伸应变下进一步提升至1.85×106 S/m,大变形下全程稳定导电;
驱动性能跃升:四层线圈驱动器体积力密度达4.00×104 N・m-3,较单层线圈提升66%;1 A电流下可稳定提起10.6 g重物,负载能力是同尺寸单层器件的3.3倍;
可靠性拉满:双层线圈驱动器经20万次循环弯曲(超8小时)仍正常工作,长期使用稳定性优异。
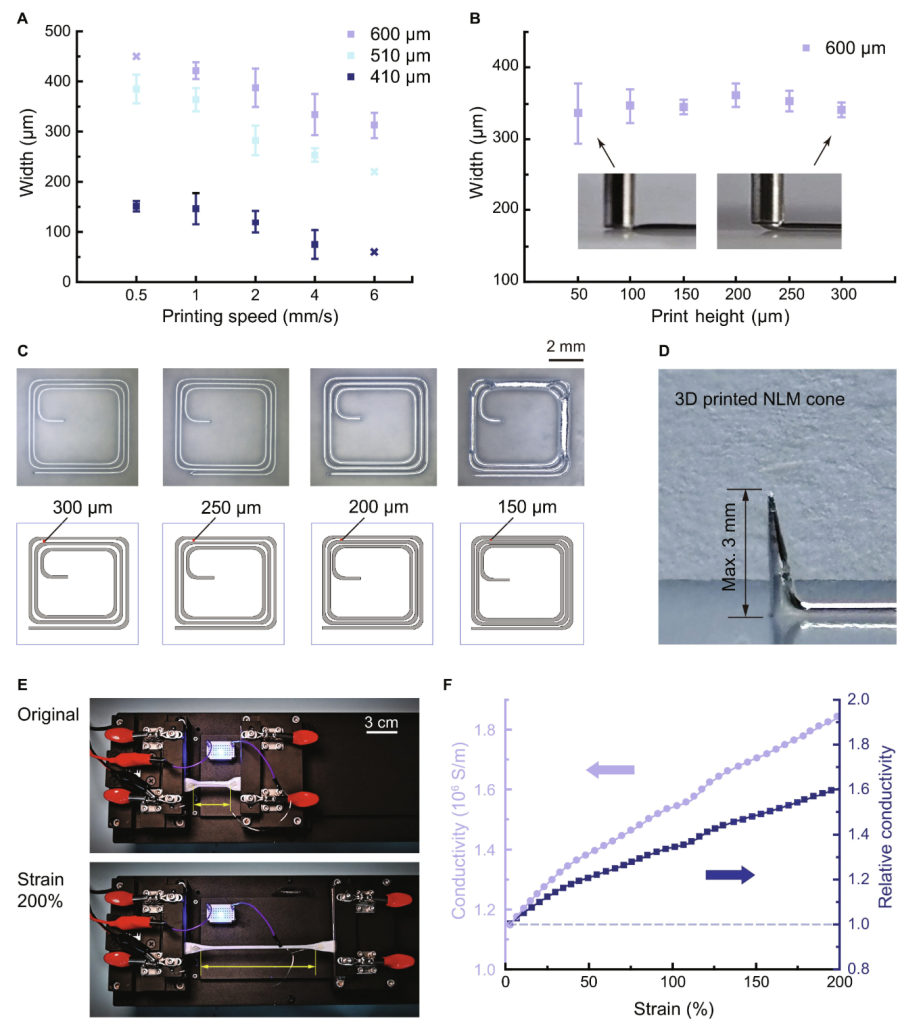
图 3. 打印工艺参数与镍颗粒改性液金属 – 弹性体复合结构的机电性能表征。(A) 喷嘴直径分别为 600μm、510μm 和 410μm 时,镍颗粒改性液金属打印线宽随打印速度的变化曲线;(B) 600μm 直径喷嘴下,镍颗粒改性液金属打印线宽随打印高度的变化曲线;(C) 打印线间距为 150~300μm 的镍颗粒改性液金属线圈实物图,验证得到最小可行打印线间距为 200μm;(D) 垂直打印制备的最大高度为 3mm 的镍颗粒改性液金属锥台实物图;(E) 弹性体封装的镍颗粒改性液金属导线的拉伸性能测试实物图;(F) 拉伸应变作用下,镍颗粒改性液金属导线的绝对电导率和相对电导率变化曲线。
核心驱动器:驱感一体化设计,实现位姿实时感知
依托多材料打印的设计灵活性,团队实现驱动与传感模块的单步集成打印,制备出自传感软体电磁驱动器:
双层线圈架构,一层驱动、一层传感,无需额外组装;
±0.6 A驱动电流下实现±60°双向可控弯曲,传感电阻与弯曲角度一一对应;
传感响应时间小于1.5 s,可实现驱动器位姿近实时检测,为软体机器人闭环控制奠定核心基础。
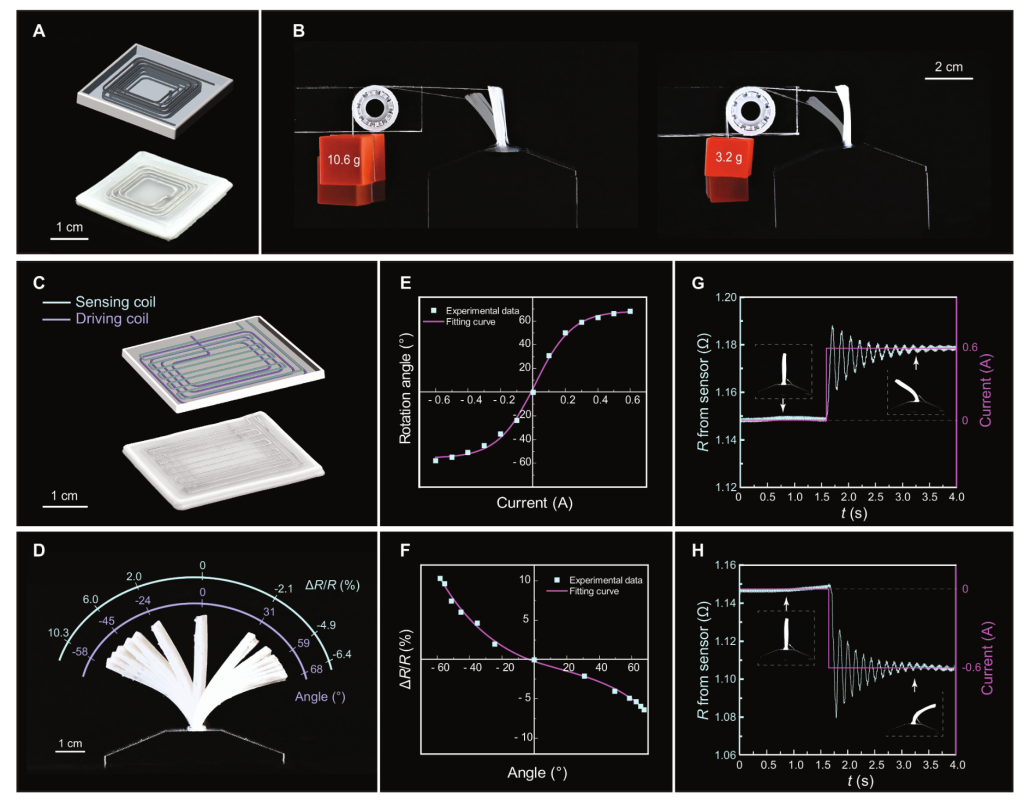
图 4. 3D 打印软体电磁致动器的性能表征。(A) 带四层线圈的软体电磁致动器实物图;(B) 用于测试四层线圈和单层线圈软体电磁致动器输出力的实验装置图;(C) 集成驱动线圈和传感线圈的自传感软体电磁致动器实物图;(D) 方波电流驱动下,自传感软体电磁致动器的旋转角度及对应的传感线圈相对电阻变化侧视图;(E) 自传感软体电磁致动器的旋转角度随施加电流的变化曲线,含实验数据点和拟合曲线;(F) 传感线圈的相对电阻变化与自传感软体电磁致动器旋转角度的关联曲线;(G、H) 0 至 ±0.6A 阶跃电流驱动致动器时,传感层电阻的实时响应曲线。
应用场景验证:多种功能器件原型展示,应用前景广阔
基于该技术,团队构建了三款核心功能器件,全面验证了技术的通用性与工程化潜力:
传感集成软体抓手:可通过电阻信号精准区分空载/带载抓取状态,实现抓取动作的自主感知与反馈;
仿生蝠鲼状游泳机器人:体长44 mm,翼展64 mm,水环境下游速达29 mm/s(0.66 体长/秒),实现稳定节律性游动;
高鲁棒性集成电子器件:打印集成霍尔传感器与LED的驱动器,在拉伸、弯曲、扭转循环下保持稳定工作。
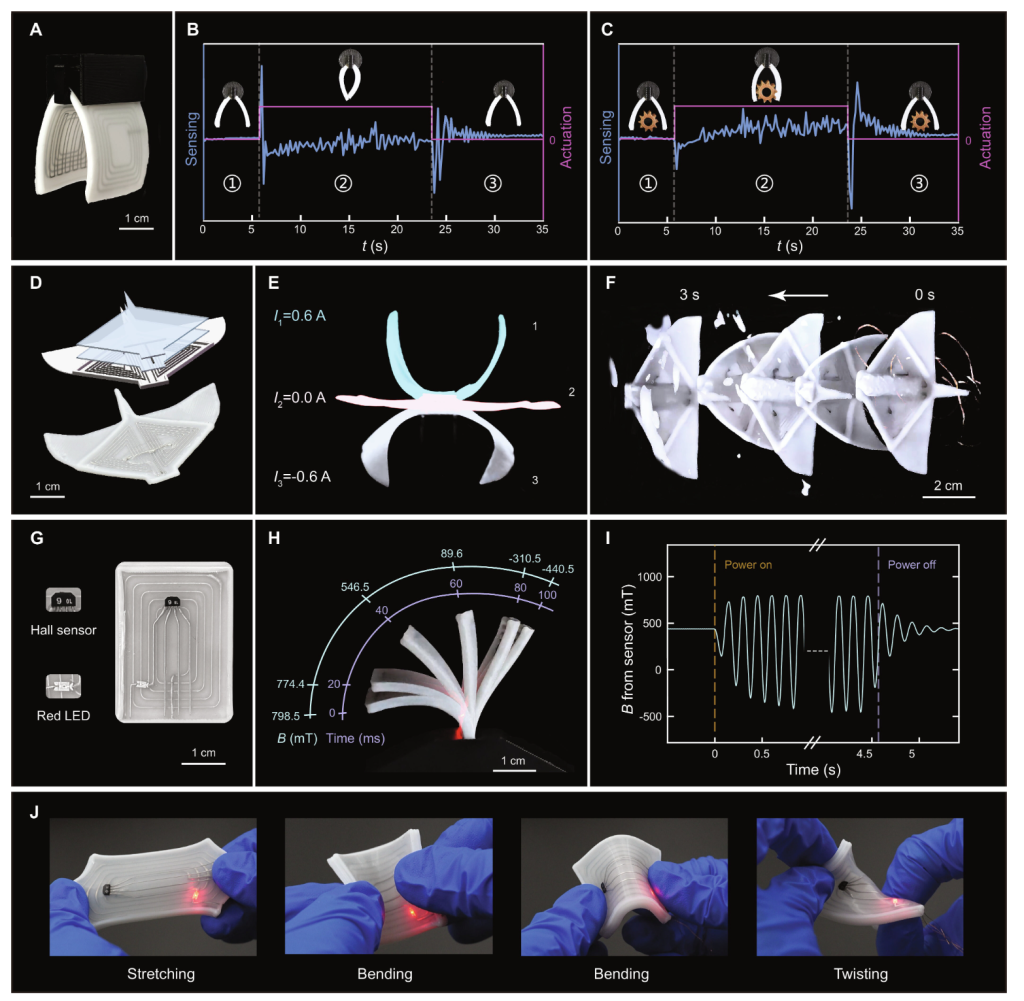
图 5. 3D 打印软体电磁机器人及集成电子器件的软体电磁驱动器性能表征。(A) 传感集成软体抓手实物图;(B、C) 软体抓手在无负载和带负载抓取实验中的电阻信号变化曲线;(D) 带双层线圈的仿生蝠鲼状软体电磁机器人实物图;(E) ±0.6A 电流驱动下,仿生蝠鲼状软体电磁机器人在空气中拍动运动的瞬时快照;(F) 仿生蝠鲼状软体电磁机器人在水环境中的游动性能测试结果;(G) 集成霍尔传感器与红色发光二极管(LED)的 3D 打印软体电磁驱动器实物图;(H) 该致动器单次摆动过程中,垂直穿过霍尔传感器的磁场强度变化曲线;(I) 致动器左右周期性弯曲时,霍尔传感器检测到的磁场强度变化曲线;(J) 集成霍尔传感器与红色 LED 的 3D 打印软体电磁驱动器在拉伸、反复弯曲和扭转循环下的机械鲁棒性测试。
综上,该研究提出的一体化3D打印策略,大大简化了具有多层结构的软体电磁机器人与可拉伸电子器件的制造流程,突破了多层线圈结构一体化成型的行业瓶颈,为软体机器人的多功能化、微型化发展提供了全新技术路径,在微创医疗、可穿戴设备、柔性电子等领域具备广阔应用前景。
本文的通讯作者是浙江大学航空航天学院毛国勇研究员,浙江大学硕士研究生宋笑语为第一作者。浙江大学曲绍兴教授对该工作进行了指导。
Last Updated on 2026-05-02 by Rocket Mao