对于机器人抓取和人机交互而言,准确判断目标物体的软硬程度,是实现稳定操作与安全交互的关键。人工触觉系统在过去数十年中取得了显著进展,感知对象已从单一力信号拓展到物体形状、柔软度、粗糙度、纹理和材料类型等多维信息。然而,现有触觉传感仍以定性识别为主,面向材料力学参数的定量感知仍处于发展初期。对于实现接近人类水平的机器人灵巧操作而言,定量机械感知尤为关键。此外,材料在应力下的变形方式并不只由Young’s modulus决定,Poisson’s ratio也会影响材料在接触过程中的横向变形、表面鼓起和力学响应。传统触觉传感方法多关注压力、位移或接触形变信号,对Poisson’s ratio的影响考虑不足,因此在复杂材料识别和定量表征中仍存在局限。
近日,中山大学葛进团队与浙江大学毛国勇课题组合作提出一种基于合成材料库训练的触觉传感新策略,实现了对材料Young’s modulus和Poisson’s ratio的同步定量感知。相关成果以Synthetic materials trained tactile sensing enables quantitative perception of Young’s modulus and Poisson’s ratio为题发表于Nature Communications。
核心亮点:从“软硬判断”到“双参数定量表征”
该工作针对触觉感知长期停留在定性识别、难以同时解析材料刚度与横向变形能力的局限,构建了覆盖不同Young’s modulus和Poisson’s ratio组合的合成材料库,并采集压缩接触过程中材料表面鼓起高度随压力变化的轨迹信息。相比传统只依赖单点压力-形变响应的方法,这一轨迹信号能够更完整地编码材料的力学行为。基于机器学习模型,传感器实现了对Young’s modulus的高精度定量预测,并进一步对Poisson’s ratio进行同步反演,使触觉感知从“识别软硬”推进到“同时表征双弹性参数”。
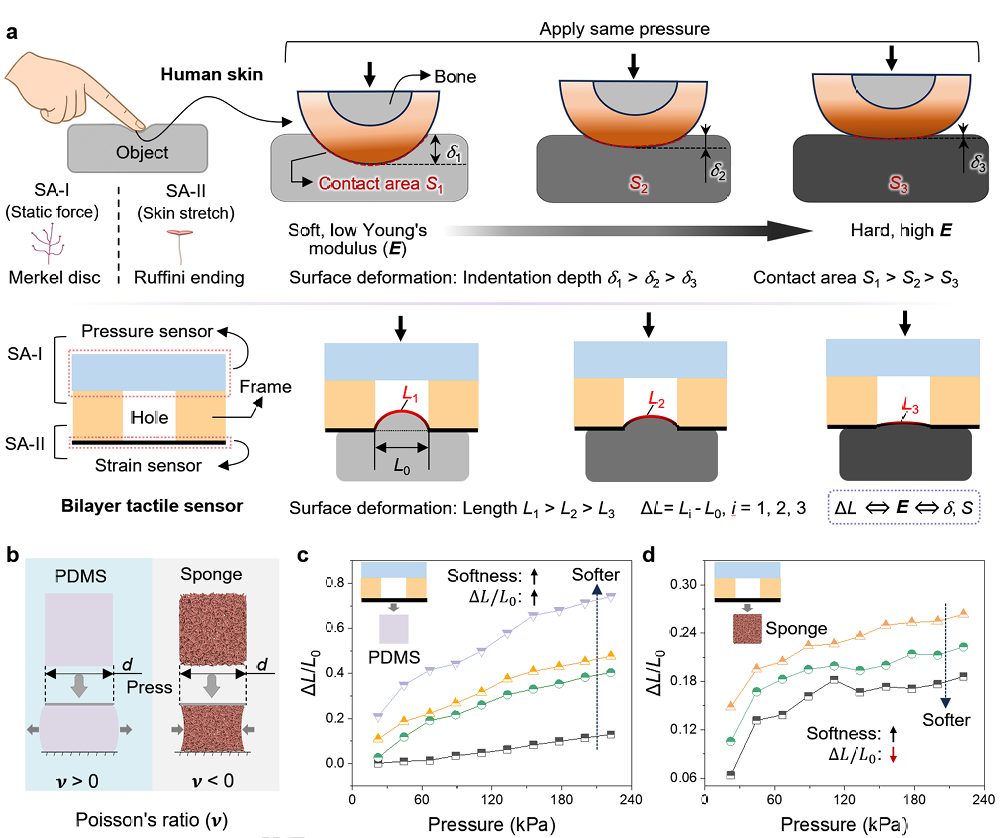
图 1. 杨氏模量检测中依赖泊松比的精度。
力学仿真:参数规律与PU海绵微结构演化
我们主要承担了该工作中的力学仿真与理论模型等部分。通过有限元模拟,我们系统分析了不同Young’s modulus和 Poisson’s ratio条件下材料在压缩接触中的变形过程,揭示了二者如何影响表面鼓起高度、鼓起形貌以及压力响应轨迹。仿真结果与材料库实验相互印证。这一机理分析为后续机器学习模型识别Young’s modulus和Poisson’s ratio提供了物理基础。
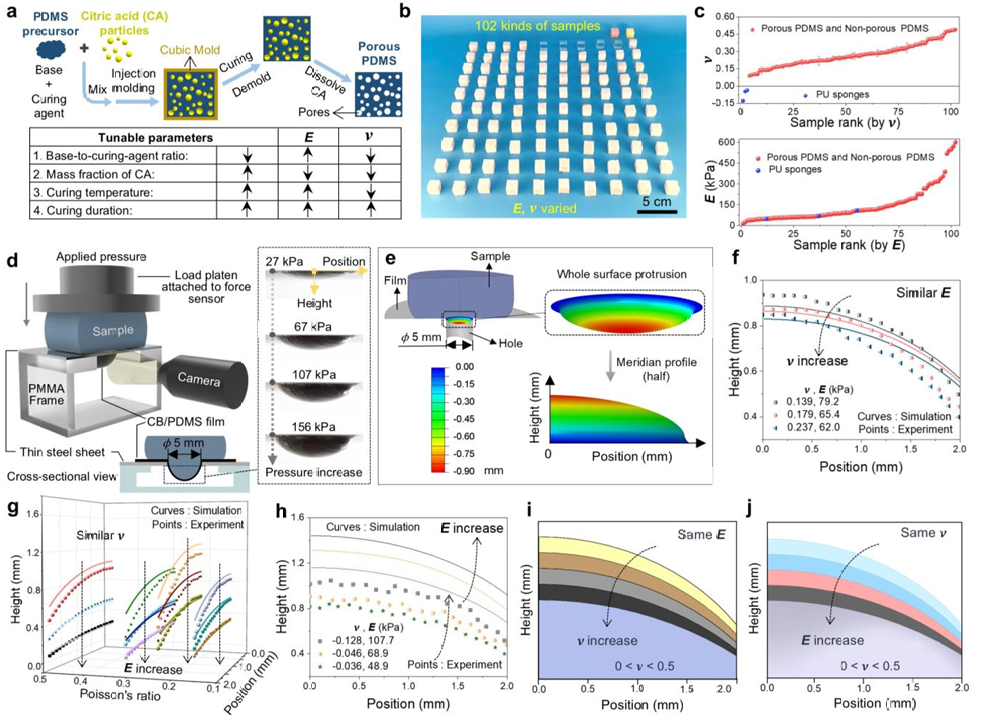
图 2. 泊松比对表面隆起形貌的影响。
针对PU海绵这一特殊材料,我们进一步建立了两个对应不同泡沫样品的蜂窝模型,用于从微结构层面解释PU海绵的非线性变形行为。仿真显示,在低压阶段,蜂窝结构会先表现出类似正Poisson’s ratio材料的横向扩展;随着压力增加,孔隙逐步塌陷横向收缩,表面鼓起高度-压力曲线发生反转。这一蜂窝结构演化过程解释了为什么PU海绵的压缩响应会与多孔PDMS材料的不同,也为触觉信号中所包含的力学信息提供了更清晰的支撑。
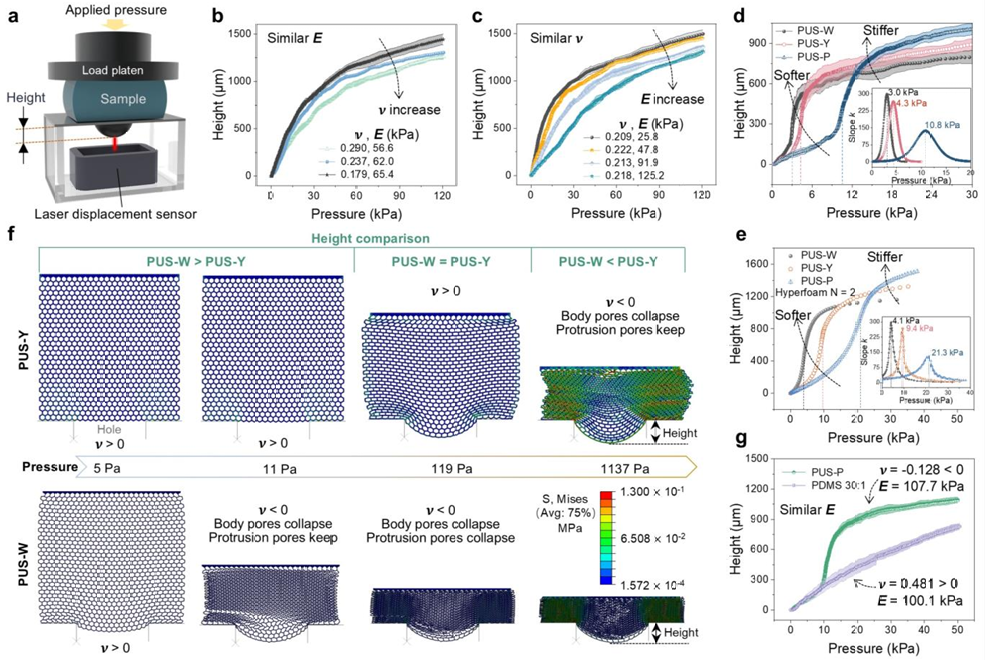
图 3. 表面隆起高度对泊松比的依赖性。
理论模型:杨氏模量计算的理论模型
在杨氏模量计算中,我们对比了实验装置与Sakamoto et al.提出的无限弹性体压入开圆孔刚性基体轴对称理论模型,并根据实验进行简化。该模型被用来评估触觉传感器输出的物理有效性。结果证明输出信号具有物理意义并符合力学理论。
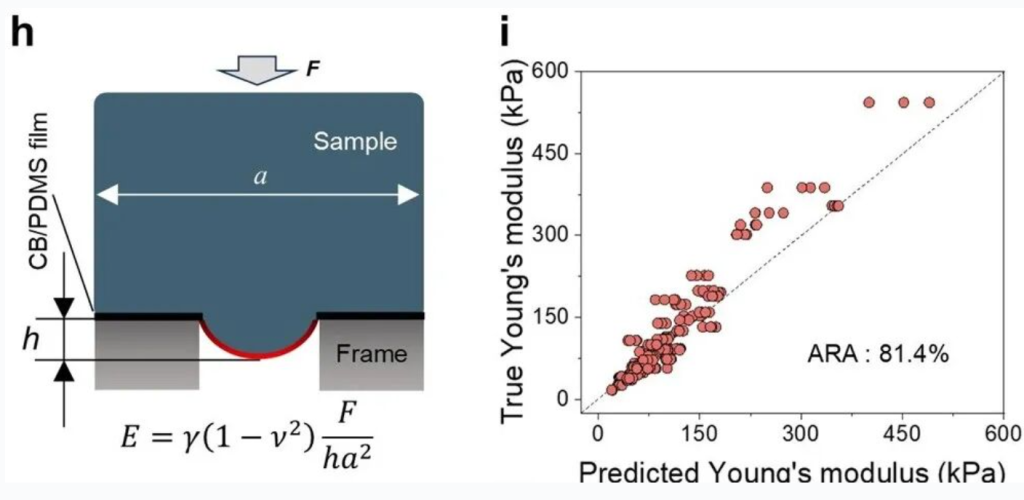
图 4. 杨氏模量计算理论模型与评估
应用验证:机器人压触场景下的未知样品识别
为验证该触觉传感策略的实际应用能力,研究团队将传感器集成到机器人机械臂上,在压触场景中对 8 个标准样品进行了测试。机械臂对每个样品执行 3 次连续压缩-释放循环,实时采集与表面鼓起高度和压力相关的电压信号,并输入训练好的FCNN模型进行反演。结果显示,8个标准样品Young’s modulus和Poisson’s ratio的预测ARA分别达到86.7%和88.9%,说明该方法具备较强的机器人在线感知能力。
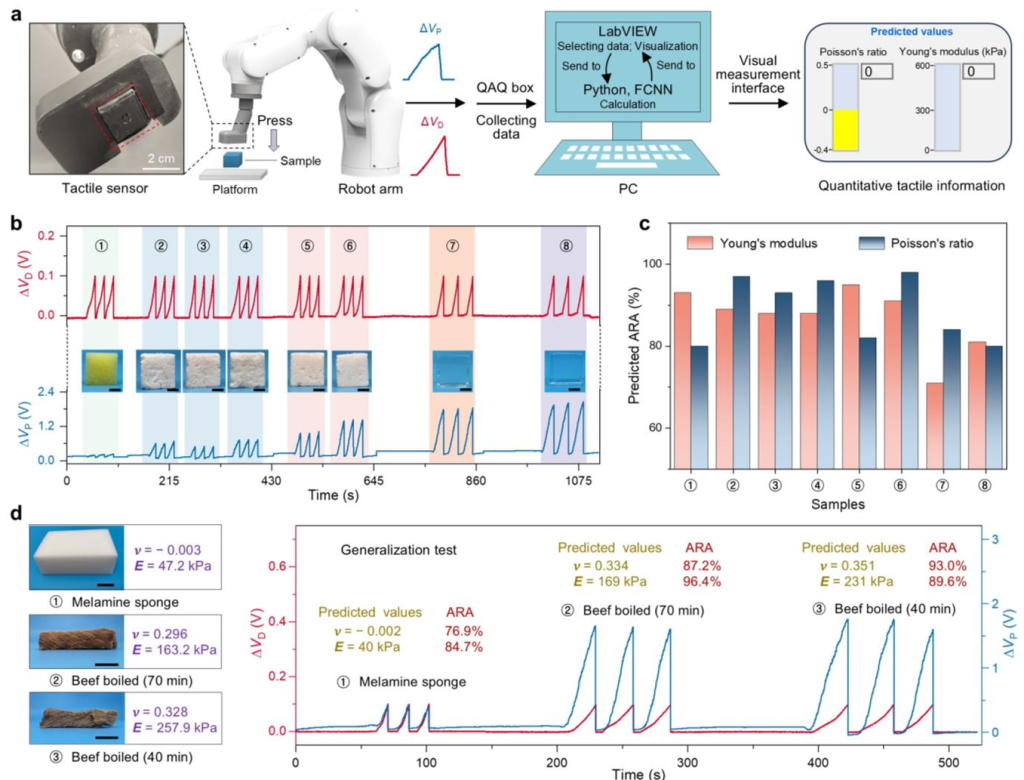
图 5. 通过压缩触觉进行杨氏模量和泊松比预测的触觉传感器机器人集成。
进一步地,为验证对库外样品的泛化性,研究选取了三聚氰胺海绵以及不同煮制时间的牛肉作为代表性“未知”对象,在不同尺寸条件下重复测试。结果表明,该传感器仍可稳定预测Young’s modulus和Poisson’s ratio,并且能够通过力学参数变化区分不同熟化程度的牛肉,说明其不仅适用于标准材料识别,也有望服务于家用机器人、食品状态评估等真实场景。
总结
综上,该工作以广泛材料库为基础,将触觉感知从传统单点式软硬判断推进到对杨氏模量和泊松比的同步定量识别。我们参与的力学仿真工作,则从材料本征参数规律和 PU 海绵蜂窝微结构演化两个层面,解释了表面鼓起轨迹背后的力学机制,也为模型训练和器件设计提供了理论支撑。结合机器人平台验证与未知样品测试,该方法展示了较强的泛化能力和应用潜力,为下一代定量触觉感知提供了新的实现路径。
本文通讯作者为中山大学葛进教授和浙江大学毛国勇研究员。共同第一作者为中山大学博士研究生解佳森和浙江大学硕士研究生刘星月。
Last Updated on 2026-06-07 by Rocket Mao