一、研究背景:猎豹、兔子或蟑螂等自然生物将高速运动作为其主要生存策略之一来寻找食物或逃离捕食者。如果以每秒体长(BL)表示的相对速度,那么对于某些螨虫(Paratarsotomus macropalpis),其速度可高达323BL/s。人造机械中,基于大功率发动机(例如内燃机或电动机)可以使一级方程式赛车以50BL/s高速运动。由于传统高性能电机和传动系统的小型化困难,高速小型机器人(1mm<BL≤100mm)的设计具有挑战性。而由新型智能材料制成的简单结构为构建小型机器人提供了可能性。例如压电材料(PZT)和形状记忆合金(SMA)是在毫米级机器人中应用的两种具有代表性的刚性智能材料,但它们的驱动行程/变形太小或频率太低,无法进行高速运动。新兴的机器人技术在人机交互的需求驱动下,还要求机器人满足能够在恶劣的随时变化的环境中运行安全、快速和稳健的运行并进一步提高其自身的安全性。
二、文章简介:
针对上述问题,基于液态金属与超弹橡胶材料,奥地利Martin Kaltenbrunner团队开发了一系列高速、高可靠性的、多功能的小型软电磁机器人(SEMR),能够行走、跑步、跳跃、游泳、转向,甚至运输和释放货物。通过制造技术、机器人设计技术、理论与数值建模的多种技术手段的有机结合,提高了微型软体机器人的性能。我们展示了毫米级的SEMR能以70BL/s的相对速度高速运动,比以前的软体机器人快约17.5倍,比厘米级电磁机器人和大多数动物快(图1b)。此外,相同的SEMR还能够以4.8L/s的高相对速度游泳,这与其他水生机器人和动物相比也具有一定优势。我们还尝试制备了无系留SEMR并能以2.1BL/s的运动以及1.8BL/s的速度游泳。相关研究成果发表于Nature Communications上。
图1. SEMR 的制造和性能。
三、研究内容:1、软体机器人制备
许多动物和大多数软机器人利用其弯曲身体的膨胀/收缩来进行快速运动,我们也采取了相同的策略。我们设计了含有液态金属线圈的弯曲弹性双层膜作为软体机器人的主体。我们对双层膜的其中一层应用机械预拉伸以引起应变失配。SEMR中液态金属线圈由自制的直接墨水书写(DIW)3D打印机在预拉伸的薄膜上打印。随后我们将橡胶溶液浇筑于液态金属线圈之上并固化,这样当双层膜被释放时,整个双层膜结构由于应变失配而弯曲。为了得到双层膜的曲率与所需厚度和预拉伸的关系,我们开展了数值有限元法(FEM)(图2a)和理论研究并对设计及制造进行了较好地预测与指导。
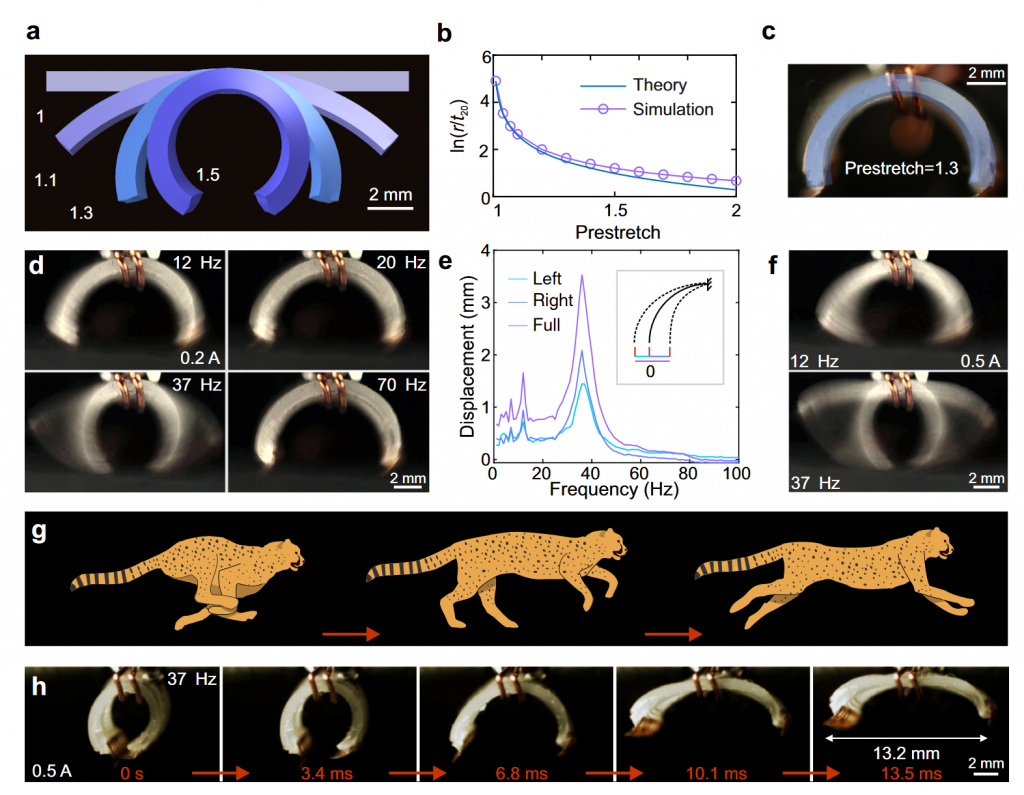
图2. 小型SEMR的设计和表征。2.软体机器人的振动测试与理论速度预测
为了预测软体机器人的运动速度,我们构建了基于线性弯曲梁结构的机械振动的理论模型并预测了SEMR在不同载荷下动态性能。同时进行了一系列实验以验证该模型并进一步表征SEMR的几何形状和机械性能。结果表明理论预测与实验总体一致,对于机器人的优化设计提供了指导。3. 机器人脚设计与跑动速度验证
众所周知,爪子在猎豹的高速奔跑中起着重要作用。同样,适当的脚设计对于SEMR的高速运行至关重要。我们介绍了图1a中展示的两种脚设计策略,它们均源于SEMR的受力分析。在第一种方法中,机器人脚由薄的锯齿状聚合物薄膜制成;这种机器人主要在3D打印的不对称结构的基板上运行(图1a)。在不同频率和各种电流幅度下的测试(图3i)表明,在共振频率下达到了最大机器人速度。由于自由和夹紧机器人的边界条件不同,图3i 中的共振频率(45Hz)大于振动测试中的共振频率(图2e中~37 Hz)。测得的最高运行速度为630mm/s,或 70BL/s(补充视频3,见文末)。据我们所知,该速度是以前的软体机器人的17.5倍(图1b)。在第二种设计中,不对称完全是由于机器人本身的 L 形脚(图3f-h,j)所导致的从而此类SEMR在各种平面非结构化基板上运行(图3k)。图3h显示了补充视频3中的代表帧,其中SEMRTL在玻璃板上运行。图3h上面板(0.3A,40Hz)演示受控运行。经过短暂的加速阶段后,速度稳定在165mm/s的恒定值,对应于18.3BL/s。底部序列电流更高,更接近机械共振(0.4A,30Hz),从而运动速度更快(35BL/s)。

图3. SEMR的运行机制和性能。
4. 多功能性展示
除了高速移动外,许多动物还有多种生存策略,包括对受撞击或坠落后的强恢复能力、躲避障碍的能力、随意穿越陆地/水生边界的能力,以及运输猎物和/或后代的能力。其中一些功能启发机器人技术。在耐久性测试中,我们的SEMR在行走过程中被强力(1764倍体重)压平(图4a,补充视频5)。机器人在撞击前后的表现保持一致。我们甚至用拉伸试验机压缩了SEMR TL的主体,发现密封的液态金属可以承受高达139 atm的压缩应力。
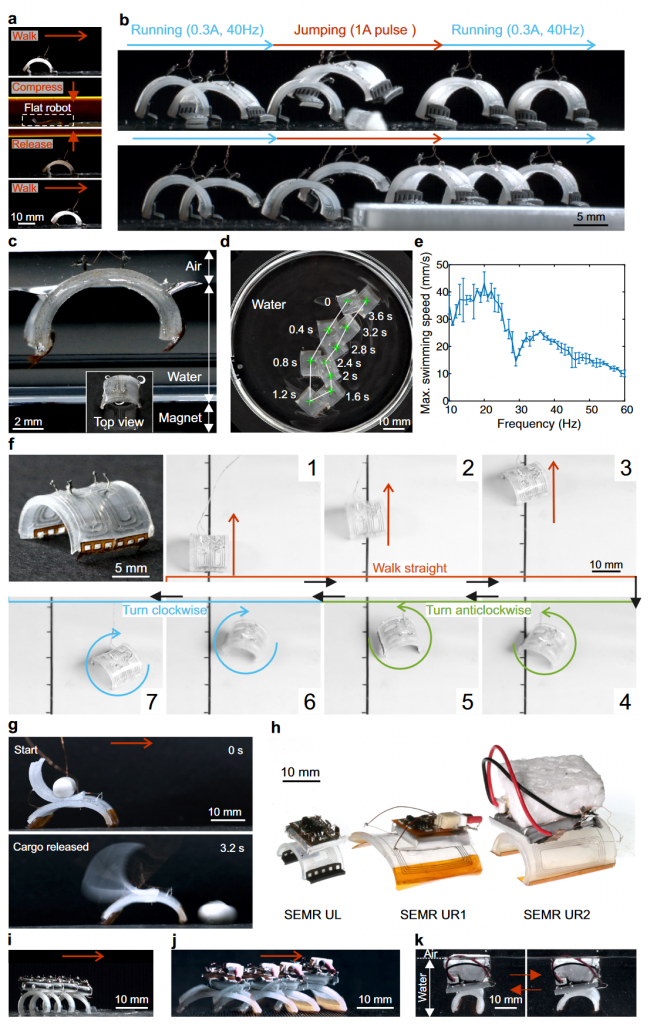
图4.多功能的SEMR:跳跃、游泳、导航和自主。然而,仅有弹性是不够的。对于大多数小型机器人来说,如何跨过障碍仍然具有挑战性。实验证明了SEMR TST可以通过高达4 mm(补充视频6)的障碍物。凭借SEMR TST自身重量轻和相对较低的平均密度,借助于表面张力和浮力,其可以漂浮在水面上(图4c)。且机器人能以43 mm/s或4.8 BL/s的最大速度沿水面游泳(图4d,e,补充视频7),与其他游泳机器人相比具有优势。机器人技术中的复杂任务通常涉及多个自由度,由于所需的控制机制,这些自由度通常难以在小型软机器人中实现。由于SEMR的3D打印液态金属线圈的设计自由度高,因此我们设计并制造了包含两个单独线圈(图4f)的双模块SEMRT STS(系绳锯齿形脚,转向)。两个线圈电流的独立控制允许机器人以160°/s的角速度直线行走、顺时针或逆时针转动(图4f,补充视频8)。双模块SEMR的进一步结构重新设计,包括重新配置第二线圈的位置成为运输SEMR TRC。通过单独驱动两个模块,一个用于前进,另一个用于受控释放货物,可以自动重新定位物体(图4g,补充视频9)。
5. 自带电源软体机器人原型设计
相对线缆外接供电,自供电/不受束缚的机器人具有更大的运行自主性,并且可以更容易地对周围环境做出反应或执行通用任务。我们通过用定制的电池供电印刷电路板(PCB)(材料和方法)替换运输SEMR TRC的货物操纵执行器,为无束缚的SEMR提供了一种简单的原型设计解决方案并设计了三种机器人。SEMR UL的主体长度约为9毫米,SEMR UR1和 UR2的主体长度约为20毫米。SEMR UL可以1.2 BL/s的速度在金属表面上运行(图4i)。SEMR UR1可以在3D打印基板上以2.1 BL/s的速度运行(图4j),并在水中以1.25BL/s的速度游泳。电池的高内阻和中小型PCB提供的纯正方波电流限制了SEMR UR1的运行性能。因此,我们开发了一个更大的控制器,包括能够交流方波电流的PCB和电池。具有大PCB和电池的SEMR UR2具备以1.8 BL/s的最大游泳速度。四、结论与展望:
本文展示了多种小型软体电磁机器人SEMR,具有超高速(70BL/s)、高鲁棒性、多功能性。未来,在更强的磁场下,例如在MRI机器的内部,SEMR的速度、功率输出和效率还有很大的提升空间。其工作原理以及制备方法使其非常适合用于开发电控微型智能平台,例如文中展示的无系留SEMR。3D直接墨水书写技术的运用使得SEMR的设计与制造具备更高的自由度,可以用于未来高性能多功能微型机器人的开发,并用于灵活的微细加工、靶向药物输送和非侵入性手术等等。
五、致谢:
感谢ERC Starting Grant ‘GEL-SYS’ under grant agreement no. 757931项目的资助。
附件视频youtube链接。
Last Updated on 2023-07-19 by Rocket Mao